
В чем разница между шаговым двигателем и сервоприводом?
Шаговые двигатели или серводвигатели?
[править] Отличия
Основное отличие шаговых двигателей от серводвигателей — то, что шаговые двигатели работают без обратной связи, т.е. нет контроля — сделал ШД шаг или нет. Драйвер серводвигателя считывает показания датчика положения вала и корректирует его положение. На самом деле, отсутствие обратной связи в случае с ШД не является минусом, т.к. при правильно спроектированной и настроенной системе шаговые двигатели не пропускают шагов, т.е. пользователь не нуждается в таком контроле.
[править] Достоинства и недостатки
- Точность и стабильность шага, ШД может работать с инерционными нагрузками.
- Не нужна обратная связь. ШД сам по себе это датчик положения.
- ШД — самый доступный, бюджетный, стандартный электродвигатель. Прост в подключении и настройке.
- ШД имеет долгий срок службы.
- ШД безопасен, имеет конечный момент — он останавливается в случае заклинивания передачи.
- ШД имеет хороший момент на низких оборотах, это позволяет обойтись без редуктора.
Достоинства серводвигателей (щеточных):
- Высокая отдаваемая мощность, сравнительно с электродвигателями других типов такого же размера и веса.
- Точность позиционирования определяется установленным энкодером.
- Высокий КПД, до 90% с легкими нагрузками.
- Может быстро ускоряться.
- Может кратковременно отдать повышенную мощность (2-3 раза) и повышенный момент (5-10 раза)
- Двигатель не нагревается, потребляется ток пропорционально нагрузке.
- На высоких скоростях не шумит.
- Не резонирует и не вибрирует во всем диапазоне частот вращения.
Недостатки шаговых двигателей:
- Низкий КПД. ШД потребляет достаточно энергии не зависимо от нагрузки.
- Низкая отдаваемая мощность, сравнительно с электродвигателями других типов такого же размера и веса.
- Крутящий момент сильно зависит от оборотов вращения, сильно падает с увеличением частоты вращения.
- Склонность к резонированию. Требует микрошагового управления для плавного вращения и техник подавления резонансов.
- Отсутствие обратной связи для контроля за пропуском шагов.
- Не может быстро ускоряться.
- ШД сильно нагревается при оптимальном использовании.
- При кратковременной перегрузке, ШД остановится и не сможет восстановить положение вала.
- ШД достаточно шумный (звуковой шум)
Недостатки серводвигателей (щеточных):
- Более высокая стоимость, сравнительно с ШД.
- Система с серводвигателем требует настройки.
- Сложная система. Много соединительных проводов. Наличие энкодера.
- Небезопасная система, если нарушается обратная связь — серводвигатель может провернуть передачу. Требуются системы экстренного отключения.
- Щетки изнашиваются. После 2000 часов работы, требуется их замена.
- Серводвигатель может перегореть при постоянной перегрузке.
- Требуется мощный источник питания, чтобы система была устойчива к кратковременным перегрузкам.
- Серводвигатель отдает максимальный момент на высоких оборотах, поэтому может потребоваться редуктор.
- Серводвигатели плохо охлаждаются. Серводвигатели с вентиляционными отверстиями быстро засоряются продуктами обработки материалов.
[править] Выбор — ШД или серводвигатели
При разработке станка и выборе электродвигателей в первую очередь необходимо рассчитать, какая мощность N(Вт) требуется для управления вашим механизмом. Мы не рекомендуем сначала приобретать электродвигатель а потом пытаться его «приладить» к своей конструкции. Мы рекомендуем использовать шаговые электродвигатели, если расчетная мощность 200Вт. Если расчетная мощность находится в диапазоне 100. 200Вт — подойдет и шаговый и серводвигатель, выбор ложится на пользователя. При выборе шагового двигателя стоит учитывать тот факт, что у него момент падает с увеличением частоты вращения, согласно приведенным в ТХ графикам.
Метод расчета мощности: Допустим у вас есть ЧПУ плазморез с ременной передачей или подобный ЧПУ станок с малой рабочей нагрузкой (нет усилия для фрезеровки, нужно только перемещать головку плазмореза или лазера). Вам необходимо рассчитать мощность для перемещения оси Y. Допустим Ваша расчетная скорость подачи f=10000 мм/мин, масса перемещаемой конструкции с запасом m=20кг. По инженерной формуле, потребуется мощность N=(f*m)/6120=33Вт. В данном случае можно использовать шаговый двигатель.
Проведем расчет для фрезерного станка ЧПУ. Пусть у вас установлен винт ШВП 1605 — с шагом n=5мм на оборот. Пусть вам необходима скорость подачи f=3000 мм/мин. Рассчитаем необходимые обороты электродвигателя с прямым приводом на винт ШВП RPM=f/n=600 об/мин. Необходимо определить вращающий момент, который нужно приложить к винту ШВП чтобы обеспечить необходимое усилие на фрезе, пусть это будет момент M. Размерность момента Н*м=(кг*см)/10 — масса в кг, которую нужно приложить к рычагу длиной 1см. Пусть в данном случае нам необходим момент 35кг*см=3,5Н*м. Мощность рассчитывается по формуле N=M*RPM*pi/30=220Вт. В данном случае нужно использовать серводвигатель.
Сервопривод или шаговый двигатель: какова разница и что выбрать?

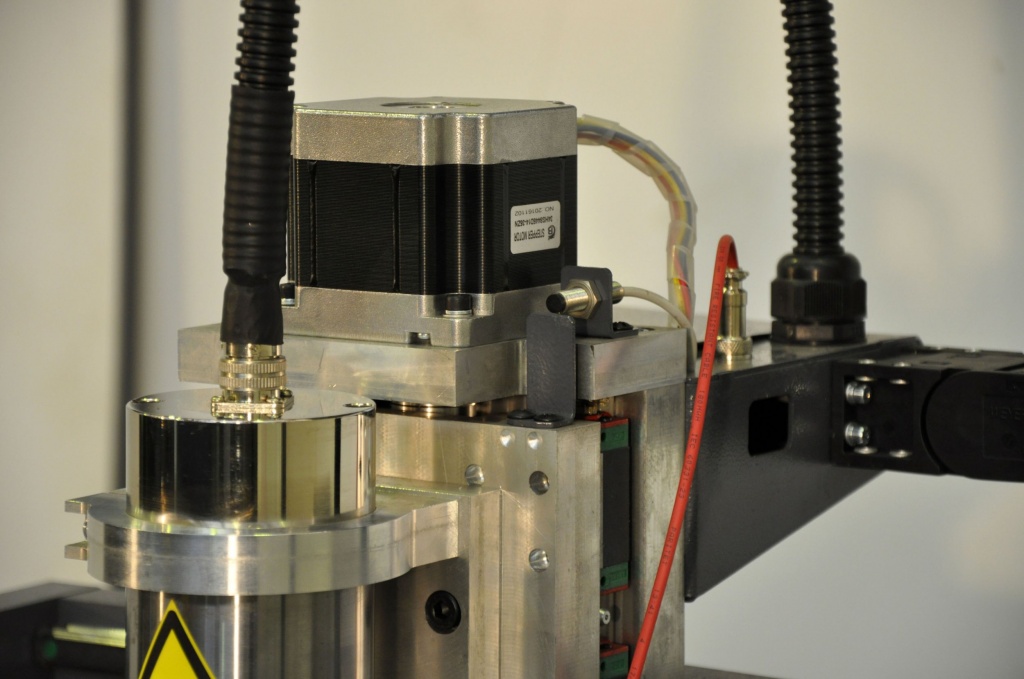
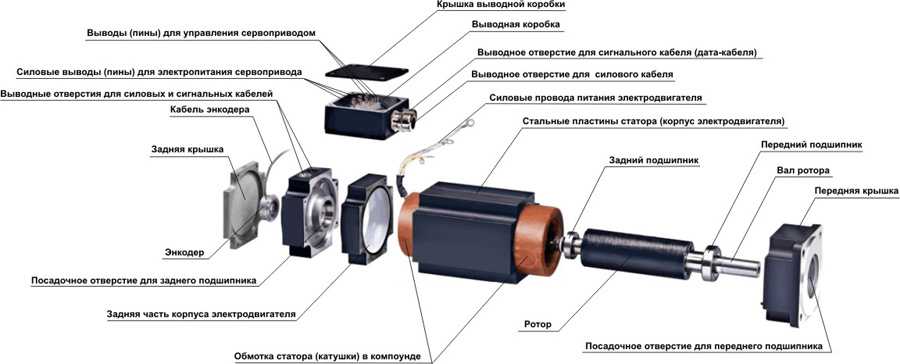
В качестве электропривода порталов и исполнительных узлов фрезерно-гравировальных станков с чпу и оборудования для плазменной резки с ЧПУ применяются шаговые двигатели и сервоприводы. Что лучше: шаговый двигатель или сервопривод, и в каких случаях применение того или иного электропривода экономически и технически оправданно, рассмотрим в данной статье.

Устройство шагового привода
Шаговый привод состоит из синхронной электрической машины и управляющего контроллера. Последний обеспечивает подачу управляющих сигналов на обмотки двигателя и их попеременное включение в соответствии с заданной программой.
Шаговый двигатель — электрическая машина, преобразующая управляющие сигналы в перемещение вала на определенный угол и фиксацию его в заданном положении. Количество шагов таких электродвигателей составляет от 100 до 400, угол шага — от 0,9-3,6°.
Принцип работы шагового двигателя
Состоит это электромеханическое устройство из статора, где размещены катушки возбуждения, и вращающейся части с постоянными магнитами или обмотками. Такая конструкция ротора обеспечивает его фиксацию после отработки управляющей команды.
На статоре расположено несколько обмоток. При подаче напряжения на катушку, под воздействием магнитного поля ротор поворачивается на определенный угол в соответствии с пространственным положением обмотки. При ее обесточивании и подаче управляющего сигнала на другую катушку вращающаяся часть электродвигателя занимает другую позицию. Каждый поворот вала соответствует углу шага. При обратной последовательности подачи напряжения на катушки ротор вращается в противоположном направлении.
Для поворота ротора на меньший угол одновременно включаются 2 обмотки. Количество шагов ограничено и зависит от числа полюсов статора электромотора. Для обеспечения плавного вращения ротора на катушки статора подают разные токи, разность которых определяет положение ротора. Такой способ управления позволяет снизить дискретность и увеличить количество шагов до 400.
К числу недостатков шаговых двигателей можно отнести довольно низкую скорость, пропуск шагов при высокой (выше расчетной) нагрузке на валу, снижение момента при высокой частоте вращения и большое время разгона.

Устройство сервопривода
Сервопривод состоит из синхронного двигателя, датчика скорости и положения, а также управляющего контроллера. Основная разница между шаговым двигателем и сервоприводом состоит в наличии обратной связи по положению, скорости, моменту на валу ротора.
Электропривод такого типа построен на базе следящей схемы автоматического регулирования. При несоответствии скорости или другой величины контроллер будет подавать сигналы на отработку, пока требуемый параметр или положение вала не будет соответствовать заданному. В качестве датчика обратной связи используют абсолютные и относительные энкодеры различных типов и конструкций.

Принцип действия сервопривода
Управляющее устройство в соответствии с заданной программой подает напряжение на сервопривод, который соединен с порталом станка. Двигатель перемещает рабочий орган. При этом энкодер вырабатывает импульсы, поступающие на контроллер. Подсчет их числа осуществляет управляющее устройство. Количество импульсов пропорционально перемещению портала. При достижении рабочим органом заданного положения на электромотор перестает поступать напряжение. Портал фиксируется. Пока число импульсов, зафиксированных контроллером с датчика, не достигнет запрограммированной величины, двигатель будет осуществлять перемещение рабочего органа.
Шаговый сервопривод можно также настроить на поддержание постоянной частоты вращения вне зависимости от нагрузки или постоянного момента при разной скорости.
К достоинствам сервоприводов относятся точность позиционирования, динамика разгона и отсутствие снижения момента при высоких скоростях. Ограничивает применение сервопривода, как правило, достаточно большая стоимость.
Чем отличается сервопривод от шагового двигателя?
Современные шаговые электродвигатели обеспечивают перемещение рабочей части с точностью до 0,01 мм.
Отличие шагового двигателя от сервопривода заключается в пропуске шагов при высокой (выше расчетной) нагрузке, что значительно снижает качество обработки
Сервопривод для поворотного стола фрезерного станка или портала другого оборудования обеспечивает точность до 0,002 мкм.
Позиционирование по следящей схеме обеспечивает высокое качество обработки независимо от нагрузки
Максимальная скорость перемещения рабочих органов при использовании шагового электропривода — 25 м.
Время разгона — 120 об/мин за секунду
Сервопривод может перемещать портал со скоростью более 60 м/мин.
Время разгона составляет до 1000 об/мин за 0,2 секунды
Критерии выбора
Тип приводного двигателя для станков выбирают по следующим характеристикам:
По этому параметру сервоприводы значительно превосходят шаговые электромоторы. На станок с ЧПУ для обработки крупных деталей или заготовок из твердых материалов лучше уставить сервомотор, например, ESTUN 1000 Вт. Такой электропривод обеспечит более высокую скорость обработки твердых материалов. Для малогабаритного промышленного оборудования (например, настольного фрезерного станка) среднего класса точности, предназначенного для обработки мягких материалов, лучше выбрать шаговый двигатель.
Программирование и настройка сервопривода на станке с ЧПУ требуют высокой квалификации исполнителя. Такой привод намного дороже в обслуживании, соответственно расходы на его эксплуатацию будут выше.
Сервоприводы для станков с ЧПУ необходимы для высокоточной автоматизированной обработки. Такой привод позволяет позиционировать положение рабочего органа с точностью до 0,02 мкм, в то время как максимальная точность шаговой электрической машины — 0, 01 мм.
Стоимость шагового двигателя значительно ниже цены сервопривода. При невысоком бюджете лучше предпочесть первый вариант.
По этому показателю сервомоторы предпочтительней. Работа шаговых электродвигателей сопровождается звуком, соответствующим частоте шагов на различных оборотах.
Таким образом, выбор сервопривода или шагового двигателя в качестве привода на фрезерно-гравировальный станок и оборудование для плазменной резки следует совершать, руководствуясь исключительно экономической и технической целесообразностью.




Предприятие MULTICUT образовано в 2009 году с целью организации выпуска отечественных координатных установок с ЧПУ для решения различных производственных задач.
подробнее о производстве
Отличие серводвигателей и шаговых двигателей
УСТРОЙСТВО ШАГОВОГО ПРИВОДА
Шаговый двигатель состоит из синхронной электрической машины и управляющего контроллера. Последний обеспечивает подачу управляющих сигналов на обмотки двигателя и их попеременное включение в соответствии с заданной программой.
Шаговый двигатель — электрическая машина, преобразующая управляющие сигналы в перемещение вала на определенный угол и фиксацию его в заданном положении. Количество шагов таких электродвигателей составляет от 100 до 400, угол шага — от 0,9-3,6°.
ПРИНЦИП РАБОТЫ ШАГОВОГО ДВИГАТЕЛЯ
Состоит это электромеханическое устройство из статора, где размещены катушки возбуждения, и вращающейся части с постоянными магнитами или обмотками. Такая конструкция ротора обеспечивает его фиксацию после отработки управляющей команды.
На статоре расположено несколько обмоток. При подаче напряжения на катушку, под воздействием магнитного поля ротор поворачивается на определенный угол в соответствии с пространственным положением обмотки. При ее обесточивании и подаче управляющего сигнала на другую катушку вращающаяся часть электродвигателя занимает другую позицию. Каждый поворот вала соответствует углу шага. При обратной последовательности подачи напряжения на катушки ротор вращается в противоположном направлении.
Для поворота ротора на меньший угол одновременно включаются 2 обмотки. Количество шагов ограничено и зависит от числа полюсов статора электромотора. Для обеспечения плавного вращения ротора на катушки статора подают разные токи, разность которых определяет положение ротора. Такой способ управления позволяет снизить дискретность и увеличить количество шагов до 400.
К числу недостатков шаговых двигателей можно отнести довольно низкую скорость, пропуск шагов при высокой (выше расчетной) нагрузке на валу, снижение момента при высокой частоте вращения и большое время разгона.
УСТРОЙСТВО СЕРВОПРИВОДА
Сервопривод состоит из синхронного двигателя, датчика скорости и положения, а также управляющего контроллера. Основная разница между шаговым двигателем и сервоприводом состоит в наличии обратной связи по положению, скорости, моменту на валу ротора.
Электропривод такого типа построен на базе следящей схемы автоматического регулирования. При несоответствии скорости или другой величины контроллер будет подавать сигналы на отработку, пока требуемый параметр или положение вала не будет соответствовать заданному. В качестве датчика обратной связи используют абсолютные и относительные энкодеры различных типов и конструкций.
ПРИНЦИП ДЕЙСТВИЯ СЕРВОПРИВОДА
Работа типичного сервопривода состоит из нескольких цикличных этапов:
1. Сервопривод получает на управляемый вход некое значение внешнего управляющего параметра, на которое настроен сервопривод. Например, часто используется — угол поворота вала электродвигателя.
2. Блок управления («сервоусилитель» или частотный преобразователь) сравнивает это значение со значением на датчике обратной связи (энкодер) или с математической моделью (алгоритм вычислений зашит в памяти частотного преобразователя).
3. На основе результата сравнения «сервоусилитель» или частотный преобразователь изменяет параметры работы электропривода и производит некоторое корректирующее действие для сервомотора (или серию действий), например: поворот вала, ускорение или замедление, так, чтобы значение с датчика обратной связи, стало как можно ближе к значению внешнего управляющего параметра (управляющие параметры задаются оператором сервопривода).
Образно можно сказать, что «сервопривод» всегда «знает» — в каком положении находится вал электродвигателя.
ОТЛИЧИЯ СЕРВОПРИВОДА ОТ ШАГОВОГО ДВИГАТЕЛЯ
Современные шаговые электродвигатели обеспечивают перемещение рабочей части с точностью до 0,01 мм.
Отличие шагового двигателя от сервопривода заключается в пропуске шагов при высокой (выше расчетной) нагрузке, что значительно снижает качество обработки
Сервопривод для поворотного стола фрезерного станка или портала другого оборудования обеспечивает точность до 0,002 мкм.
Позиционирование по следящей схеме обеспечивает высокое качество обработки независимо от нагрузки
Максимальная скорость перемещения рабочих органов при использовании шагового электропривода — 25 м.
Время разгона — 120 об/мин за секунду
Сервопривод может перемещать портал со скоростью более 60 м/мин.
Время разгона составляет до 1000 об/мин за 0,2 секунды
КРИТЕРИИ ВЫБОРА
Тип приводного двигателя для станков выбирают по следующим характеристикам:
Производительность.
По этому параметру сервоприводы значительно превосходят шаговые электромоторы. На станок с ЧПУ для обработки крупных деталей или заготовок из твердых материалов лучше уставить сервомотор, например, Yaskawa 1000 Вт. Такой электропривод обеспечит более высокую скорость обработки твердых материалов. Для малогабаритного промышленного оборудования (например, настольного фрезерного станка) среднего класса точности, предназначенного для обработки мягких материалов, лучше выбрать шаговый двигатель.
Эксплуатационные расходы.
Программирование и настройка сервопривода на станке с ЧПУ требуют высокой квалификации исполнителя. Такой привод намного дороже в обслуживании, соответственно расходы на его эксплуатацию будут выше.
Точность.
Сервоприводы для станков с ЧПУ необходимы для высокоточной автоматизированной обработки. Такой привод позволяет позиционировать положение рабочего органа с точностью до 0,02 мкм, в то время как максимальная точность шаговой электрической машины — 0, 01 мм.
Цена.
Стоимость шагового двигателя значительно ниже цены сервопривода. При невысоком бюджете лучше предпочесть первый вариант.
Уровень шума.
По этому показателю сервомоторы предпочтительней. Работа шаговых электродвигателей сопровождается звуком, соответствующим частоте шагов на различных оборотах.
Из всего выше сказанного следует, что выбор сервопривода или шагового двигателя в качестве привода на ЧПУ станок следует совершать, руководствуясь исключительно экономической и технической целесообразностью.
В чем разница между серводвигателем и шаговым электродвигателем?

Всем инженерам хорошо известно, что нет такого понятия, как идеальное решение — есть просто лучшее решение для рассматриваемой проблемы. Это особенно актуально для серводвигателей и шаговых двигателей. Оба широко используются в промышленности. Применение ни одного из них не является универсальным решением. Однако при правильном применении как шаговые, так и серводвигатели могут обеспечить эффективную и надежную работу при максимальной производительности системы. Дерево решений для выбора между ними имеет много ветвей, но наиболее важными являются скорость, ускорение и цена.
Шаговые двигатели
Шаговые двигатели состоят из ротора с постоянными магнитами и неподвижного статора, в котором расположены обмотки. Когда ток проходит через обмотки статора, он генерирует магнитный поток, который взаимодействует с магнитным полем ротора и приводит ротор в движение. Шаговые двигатели имеют очень большое количество полюсов, обычно 50 или более. Драйвер шагового двигателя последовательно подает напряжение на каждый полюс, так что ротор вращается с определенным шагом. Из-за очень большого количества полюсов движение кажется непрерывным.
Шаговые электродвигатели имеют ряд положительных качеств. Поскольку они генерируют пошаговое движение, для них, как правило, не требуется замкнутая система регулирования, что избавляет от необходимости установки энкодера или тахогенератора, что положительно сказывается на цене установки. Большое количество полюсов позволяет им генерировать очень высокий крутящий момент при нулевой скорости. Они компактны и в целом экономичны (рисунок ниже).

С другой стороны, шаговые электродвигатели имеют ограничения по скорости. Они обычно работают с максимальной эффективностью всего при 1200 об / мин или ниже. Хотя они генерируют высокий крутящий момент при нулевой скорости, крутящий момент падает при увеличении скорости (график ниже). Например, двигатель, создающий момент 3 кгс·м при нулевой скорости, может выдать только 1.5 кгс·м при 500 об / мин и всего 0.3 кгс·м при 1000 об / мин.
Теоретически можно использовать редуктор для увеличения крутящего момента, но именно здесь малая скорость шаговых двигателей становится проблемой. Добавление редуктора 10: 1 к шаговому двигателю со скоростью 1200 об / мин может повысить крутящий момент на порядок, но также снизит скорость до 120 об / мин. Если двигатель используется для шарико-винтового привода или чего-либо подобного, он, вероятно, не будет обеспечивать достаточную скорость для удовлетворения потребностей механизма.
Как правило, шаговые двигатели не изготавливаются в типоразмерах, превышающих NEMA 34, при этом большинство применений относятся к размерам двигателей NEMA 17 или NEMA 23. В результате практически невозможно найти шаговые двигатели, способные производить крутящий момент от 28 до 57 кгс·м.

На графике зеленым показана зависимость момент шагового двигателя от скорости, красным – зависимость максимального момент серводвигателя от скорости и синим – момент серводвигателя от скорости.
Шаговые двигатели также имеют ограничения по производительности. Вы можете представить себе шаговый двигатель как пружинно-массовую систему. Двигатель должен преодолеть трение, чтобы начать вращение и переместить нагрузку, после чего ротор машины не контролируется. В результате команда продвижения на пять шагов может привести к повороту двигателя только на четыре шага или шесть шагов.
Однако, если система электропривода дает команду двигателю продвинуться на 200 шагов и он сделает это за несколько шагов, ошибка составит несколько процентов. Хотя мы используем шаговые электродвигатели с разрешением от 25 000 до 50 000 шагов на оборот, но поскольку двигатель представляет собой систему с пружинно-массовой нагрузкой, наш обычный диапазон составляет от 2000 до 6000 отсчетов за оборот. Тем не менее, при этих разрешениях даже ошибка в 200 шагов соответствует доле градуса.
Добавление энкодера позволит системе точно отслеживать движение, но не сможет преодолеть базовую физику работы электрической машины. Для приложений, требующих повышенной точности позиционирования и разрешения, серводвигатели обеспечивают лучшее решение.
Серводвигатели
Как и шаговые двигатели, серводвигатели имеют много реализаций. Давайте рассмотрим наиболее распространенную конструкцию, которая включает в себя ротор с постоянными магнитами и неподвижный статор с обмотками. Здесь также ток создает распределение магнитного поля, которое воздействует на ротор и развивает крутящий момент. Однако серводвигатели имеют значительно меньшее число полюсов, чем шаговые электрические машины. В результате они должны работать в замкнутой системе управления.
В целом, серводвигатели более сложные, чем шаговые. Они работают значительно быстрее, со скоростями порядка нескольких тысяч оборотов в минуту (рисунок ниже). Это позволяет использовать серводвигатели с редукторами, чтобы обеспечить гораздо более высокий крутящий момент на нужных скоростях. Они также обеспечивают более постоянный крутящий момент во всем диапазоне скоростей электродвигателя. В отличие от шаговых двигателей, они не имеют удерживающего момента как такового.

Однако работа в замкнутом контуре позволяет контроллеру / электроприводу дать команду на удержание нагрузки в определенном положении, и двигатель будет непрерывно ее регулировать, чтобы удерживать ее на одном месте. Таким образом, серводвигатели могут обеспечивать фактический удерживающий момент. Тем не менее, обратите внимание, что вариант удерживающего крутящего момента при нулевой скорости зависит от правильного размера двигателя для управления нагрузкой и предотвращения колебаний относительно заданного местоположения.
Серводвигатели обычно используют редкоземельные магниты, в то время как шаговые двигатели чаще используют менее дорогие обычные магниты. Редкоземельные магниты позволяют развивать более высокий крутящий момент в меньшем корпусе. Серводвигатели также получают преимущество в крутящем моменте от их общего физического размера. Диаметры серводвигателей обычно варьируются от NEMA 17 до 220 мм. В результате этих комбинированных факторов серводвигатели могут выдавать крутящий момент до 114 кгс·м.

Сочетание скорости и крутящего момента позволяет серводвигателям обеспечивать лучшее ускорение, в сравнении с шаговыми двигателями. Они также обеспечивают лучшую точность позиционирования в результате работы с обратной связью.
Подведем итоги
Серводвигатели предлагают неоспоримое преимущество в производительности. Однако с точки зрения стабильности позиционирования шаговые двигатели могут быть весьма конкурентоспособными. Эта точка зрения приводит к распространенному заблуждению о шаговых двигателях, которое является мифом о «потерянном шаге». Как мы уже обсуждали ранее, массово-пружинный характер нагрузки шагового двигателя может привести к нескольким потерянным шагам. Привод дает команду движению шагового механизма в определенный угол, однако потерянные шаги не переносятся от вращения к вращению. Все зависит от необходимого уровня точности позиционирования.
Вышеприведенное обсуждение подводит нас к окончательному и ключевому различию между шаговыми электродвигателями и сервоприводами — стоимости. Шаговые двигатели обычно не требуют обратной связи, они используют менее дорогие магниты и редко содержат редуктора. Из-за большого количества полюсов и их способности генерировать удерживающий момент они потребляют меньше энергии при нулевой скорости. В результате шаговый двигатель может быть на порядок дешевле, чем аналогичный серводвигатель.
Подводя итог, можно сказать, что шаговые двигатели являются хорошим решением для механизмов с малой скоростью вращения, небольшим ускорением и малыми требованиями к точности. Шаговые двигатели также имеют тенденцию быть компактными и недорогими. Это делает эти машины подходящими для применения в медицине, биотехнологиях, безопасности и обороне, а также в производстве полупроводников. Серводвигатели — лучший выбор для систем, требующих высокой скорости, высокого ускорения и большой точности. Компромисс — более высокая стоимость и сложность. Серводвигатели обычно используются в упаковке, конвертации, плетении сетей и аналогичных приложениях.
Если ваши требования не слишком критичны, а бюджет ограничен, рассмотрите шаговый двигатель. Если производительность является наиболее важным аспектом, серводвигатель выполнит свою работу, но будьте готовы заплатить больше.
Сравнение сервоприводов и шаговых двигателей
1. Физика процесса
Электрические машины широко применяют на электрических станциях, в промышленности, на транспорте, в авиации, в системах автоматического регулирования и управления, в быту. Электрические машины преобразуют механическую энергию в электрическую и наоборот, электрическую энергию в механическую. Машина, преобразующая механическую энергию в электрическую, называется генератором. Преобразование электрической энергии в механическую осуществляется двигателями.Принцип действия электрических машин основан на использовании законов электромагнитной индукции и электромагнитных сил. Если в магнитном поле полюсов постоянных магнитов или электромагнитов поместить проводник и под действием какой-либо силы F1 перемещать его, то в нем возникает Э.Д.С. равная:
где В — магнитная индукция в месте, где находится проводник,
l — активная длина проводника (та его часть, которая находится в магнитном поле),
v — скорость перемещения проводника в магнитном поле.
Если этот проводник замкнуть на какой-либо приемник энергии, то в замкнутой цепи под действием Э.Д.С. будет протекать ток, совпадающий по направлению с Э.Д.С. в проводнике. В результате взаимодействия тока I в проводнике с магнитным полем полюсов создается электромагнитная сила Fэ, направление которой определяется по правилу левой руки; эта сила будет направлена навстречу силе, перемещающей проводник в магнитном поле. При равенстве сил F1 = Fэ проводник будет перемещаться с постоянной скоростью. Следовательно, в такой простейшей электрической машине механическая энергия, затрачиваемая на перемещение проводника, преобразуется в энергию электрическую, отдаваемую сопротивлению внешнего приемника энергии, т. е. машина работает генератором. Та же простейшая электрическая машина может работать двигателем. Если от постороннего источника электрической энергии через проводник пропустить ток, то в результате взаимодействия тока в проводнике с магнитным полем полюсов создается электромагнитная сила Рэ, под действием которой проводник начнет перемещаться в магнитном поле, преодолевая силу торможения какого-либо механического приемника энергии.
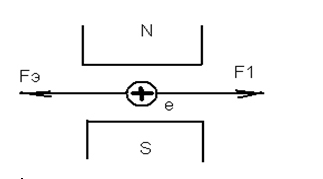 Рисунок 2 — Физика процесса
Рисунок 2 — Физика процесса
Таким образом, рассмотренная машина так же, как и любая электрическая машина, обратима, т. е. может работать как генератором, так и двигателем. Для увеличения Э.Д.С. и электромеханических сил электрические машины снабжаются обмотками, состоящими из большого числа проводов, которые соединяются между собой так, чтобы Э.Д.С. в них имели одинаковое направление и складывались. Э.Д.С. в проводнике будет индуктирована также и в том случае, когда проводник неподвижен, а перемещается магнитное поле полюсов.
2. Асинхронные двигатели
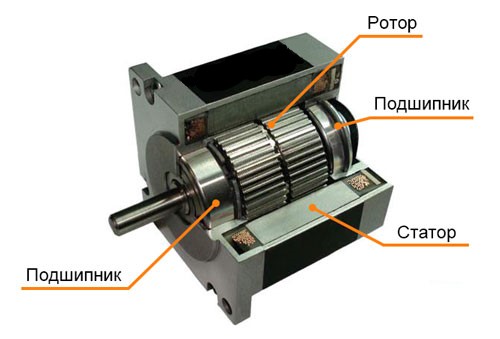
Наиболее распространенные электрические машины. В основном они используются как электродвигатели и являются основными преобразователями электрической энергии в механическую.Асинхронный двигатель имеет статор (неподвижная часть) и ротор (подвижная часть), разделенные воздушным зазором, ротор крепится на подшипниках. Активными частями являются обмотки; все остальные части — конструктивные, обеспечивающие необходимую прочность, жесткость, охлаждение, возможность вращения и т. п. По конструкции ротора асинхронные машины подразделяют на два основных типа: с короткозамкнутым ротором и с фазным ротором. Оба типа имеют одинаковую конструкцию статора и отличаются лишь исполнением обмотки ротора. Магнитопровод ротора выполняется аналогично магнитопроводу статора — из электротехнической стали и шихтованным. Фазный ротор используют когда необходимо создать большой пусковой момент. К ротору подводят ток и в результате уже возникает магнитный поток необходимый для создания момента.
На обмотку статора подается напряжение, под действием которого по этим обмоткам протекает ток и создает вращающееся магнитное поле. Магнитное поле воздействует на стержни ротора и по закону магнитной индукции возникает электрический ток т. к. изменяется магнитный поток, проходящий через замкнутый контур ротора. Токи в стержнях ротора создают собственное магнитное поле стержней, которые вступают во взаимодействие с вращающимся магнитным полем статора. В результате на каждый стержень действует сила, которая складываясь по окружности создает вращающийся электромагнитный момент ротора из-за того, что индукционный ток, возникающий в замкнутом контуре ротора, имеет такое направление, что создаваемое им магнитное поле противодействует тому изменению магнитного потока, которым был вызван данный ток. Следовательно и возникает вращение.Частота вращения ротора не может достигнуть частоты вращения магнитного поля, так как в этом случае угловая скорость вращения магнитного поля относительно обмотки ротора станет равной нулю, магнитное поле перестанет индуцировать в обмотке ротора Э.Д.С. и, в свою очередь, создавать крутящий момент.
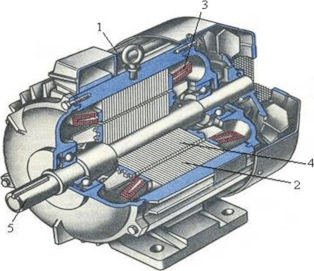 Рисунок 3 — Вид асинхронной машины с короткозамкнутым ротором в разрезе
Рисунок 3 — Вид асинхронной машины с короткозамкнутым ротором в разрезе
На рисунке приведен вид асинхронной машины с короткозамкнутым ротором в разрезе:
2 — сердечник статора,
3 — обмотка статора,
4 — сердечник ротора с короткозамкнутой обмоткой,
3. Синхронные двигатели
Синхронный двигатель не имеет принципиальных конструктивных отличий от асинхронных. На статоре синхронного двигателя помещается трехфазная обмотка, при включении которой в сеть трехфазного переменного тока будет создано вращающееся магнитное поле, число оборотов в минуту которого n = 60f/p, где f — частота напряжения питания привода. На роторе двигателя помещена обмотка возбуждения, включаемая в сеть источника постоянного тока. Либо ротор выполнен из постоянного магнита. Ток возбуждения создает магнитный поток полюсов или в случае с постоянным магнитом, магнитный поток уже создан. Вращающееся магнитное поле, полученное токами обмотки статора, увлекает за собой полюса ротора. При этом ротор может вращаться только с синхронной скоростью, т. е. со скоростью, равной скорости вращения поля статора. Таким образом, скорость синхронного двигателя строго постоянна, если неизменна частота тока питающей сети.
Достоинством синхронных двигателей является меньшая, чем у асинхронных, чувствительность к изменению напряжения питающей сети. У синхронных двигателей вращающий момент пропорционален напряжению сети в первой степени, тогда как у асинхронных — квадрату напряжения. Вращающий момент синхронного двигателя создается в результате взаимодействия магнитного поля статора с магнитным полем полюсов. От напряжения питающей сети зависит только магнитный поток поля статора.
4. Шаговые двигатели
Шаговые двигатели — это электромеханические устройства, преобразующие сигнал управления в угловое (или линейное) перемещение ротора с фиксацией его в заданном положении без устройств обратной связи. По сути шаговый двигатель является синхронным, но отличается подходом управления. Рассмотрим самые распространенные.
5. Двигатели с постоянными магнитами
Двигатели с постоянными магнитами состоят из статора, который имеет обмотки, и ротора, содержащего постоянные магниты. Чередующиеся полюса ротора имеют прямолинейную форму и расположены параллельно оси двигателя. Благодаря намагниченности ротора в таких двигателях обеспечивается больший магнитный поток и, как следствие, больший момент, чем у двигателей с переменным магнитным сопротивлением. Такой двигатель имеет величину шага 30°. При включении тока в одной из катушек, ротор стремится занять такое положение, когда разноименные полюса ротора и статора находятся друг напротив друга. Для осуществления непрерывного вращения нужно включать фазы попеременно. На практике двигатели с постоянными магнитами обычно имеют 48—24 шага на оборот (угол шага 7,5—15°). Двигатели с постоянными магнитами подвержены влиянию обратной Э.Д.С. со стороны ротора, котрая ограничивает максимальную скорость.
6. Гибридные двигатели
Являются более дорогими, чем двигатели с постоянными магнитами, зато они обеспечивают меньшую величину шага, больший момент и большую скорость. Типичное число шагов на оборот для гибридных двигателей составляет от 100 до 400 (угол шага 3,6…0,9°). Ротор гибридного двигателя имеет зубцы, расположенные в осевом направлении. Ротор разделен на две части, между которыми расположен цилиндрический постоянным магнит. Таким образом, зубцы верхней половинки ротора являются северными полюсами, а зубцы нижней половинки — южными. Кроме того, верхняя и нижняя половинки ротора повернуты друг относительно друга на половину угла шага зубцов. Число пар полюсов ротора равно количеству зубцов на одной из его половинок. Зубчатые полюсные наконечники ротора, как и статор, набраны из отдельных пластин для уменьшения потерь на вихревые токи. Статор гибридного двигателя также имеет зубцы, обеспечивая большое количество эквивалентных полюсов, в отличие от основных полюсов, на которых расположены обмотки. Обычно используются 4 основных полюса для 3,6° двигателей и 8 основных полюсов для 1,8…0,9° двигателей. Зубцы ротора обеспечивают меньшее сопротивление магнитной цепи в определенных положениях ротора, что улучшает статический и динамический момент. Это обеспечивается соответствующим расположением зубцов, когда часть зубцов ротора находится строго напротив зубцов статора, а часть между ними. Зависимость между числом полюсов ротора, числом эквивалентных полюсов статора и числом фаз определяет угол шага S двигателя:
где Nph — число эквивалентных полюсов на фазу, равное числу полюсов ротора,
Ph — число фаз,
N — полное количество полюсов для всех фаз вместе.
7. Сервопривод
Сервопривод — общее название привода, синхронного, асинхронного либо любого другого, с отрицательной обратной связью по положению, моменту и др. параметрам, позволяющего точно управлять параметрами движения. Сервопривод – это комплекс технических средств. Состав сервопривода: привод – например, электромотор, датчик обратной связи – например, датчик угла поворота выходного вала редуктора (энкодер), блок питания и управления (он же преобразователь частоты сервоусилитель инвертор servodrive). Мощность двигателей: 0,05…15 кВт. Существует понятие «вентильный двигатель». Это всего лишь названия для двигателя, управление которым осуществляется через «вентили» – ключи, переключатели и т. п. коммутационные элементы. Современными «вентилями» являются IGBT-транзисторы использующиеся в блоках управления приводами. Никакого конструктивного отличия нет. Основным достоинством сервоприводов является наличие обратной связи, благодаря которой такая система может поддерживать точность позиционирования на высоких скоростях и высоких моментах. Также систему отличает низкоинерционность и высокие динамические характеристики, например время переключения от скорости –3 000 об/мин до достижения 3 000 об/мин составляет всего 0,1 с. Современные блоки управления являются высокотехнологическими изделиями со сложной системой управления и могут обеспечить выполнение практически любой задачи.
Характеристики системы сервопривода рассмотрим основываясь на сервоприводах фирмы Delta elc. Серии блока управления ASDA-A и двигателем 400 Вт. Как видно поддержание момента линейное на всем диапазоне скоростей. Это достигается благодаря использованию синхронного двигателя в высококачественном исполнении. Величина шага перемещения определяется разрешающей способностью датчика обратной связи, энкодера, а так же блоком управления. Стандартные сервоприводы могут обеспечить шаг в 0,036° т. е. 1/10 000 от оборота, и это на скоростях до 5 000 об/мин.
Самые современные сервоприводы отрабатывают шаг в 1/2 500 000.
* — Динамическая точность — максимальное отклонение реальной траектории перемещения инструмента от запрограммированной
8. Вывод
Сервопривод и шаговый двигатель не являются конкурентами, а каждый занимает свою определенную нишу. Сравним их на основе рынка станков с ЧПУ. Применение шаговых двигателей полностью оправданно для применения в недорогих станках с ЧПУ (в ценовой категории до 10—12 тыс. USD), предназначенных для обработки дерева, пластиков, ДСП, МДФ, легких металлов и других материалов средней скорости.Применение высококачественных сервоприводов необходимо в высокопроизводительном оборудовании, где главным критерием является производительность. Единственный «недостаток» хорошего сервопривода – это его высокая стоимость. К примеру, станок ATS-760 на шаговых приводах стоит 11 000 $, а эта же модель, но на сервоприводах стоит 17 500 $. Однако возможности получения высокостабильного или точного управления, широкий диапазон регулирования скорости, высокая помехоустойчивость, малые габариты и вес часто являются решающими факторами их применения. Добившись одинаковых качеств от сервопривода и шагового их стоимости станут соизмеримыми при однозначном лидерстве сервопривода.





